Abstract:
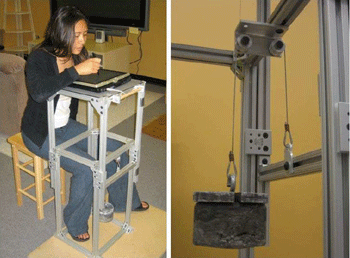
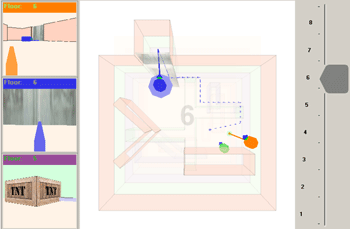
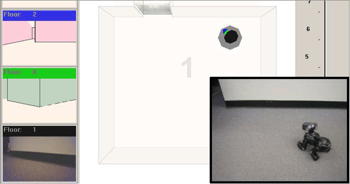
We describe a new method for controlling a group of robots in three-dimensional (3D) space using a tangible user interface called the 3D Tractus. Our interface maps the task space into an interactive 3D space, allowing a single user to intuitively monitor and control a group of robots. We present the use of the interface in controlling a group of virtual software bots and a physical Sony AIBO robot dog in a simulated Explosive Ordnance Disposal (EOD) environment involving a bomb hidden inside of a building. The user has to guide the robots to search the building for the bomb and disarm it. We also describe a comparative user study we performed where participants were asked to use both the 3D physical interface and a traditional 2D graphical user interface in order to try and demonstrate the benefits and drawbacks of each approach for HRI tasks.
Researchers: Paul Lapides, Ehud Sharlin, Saul Greenberg
Video:
![]()