Abstract:
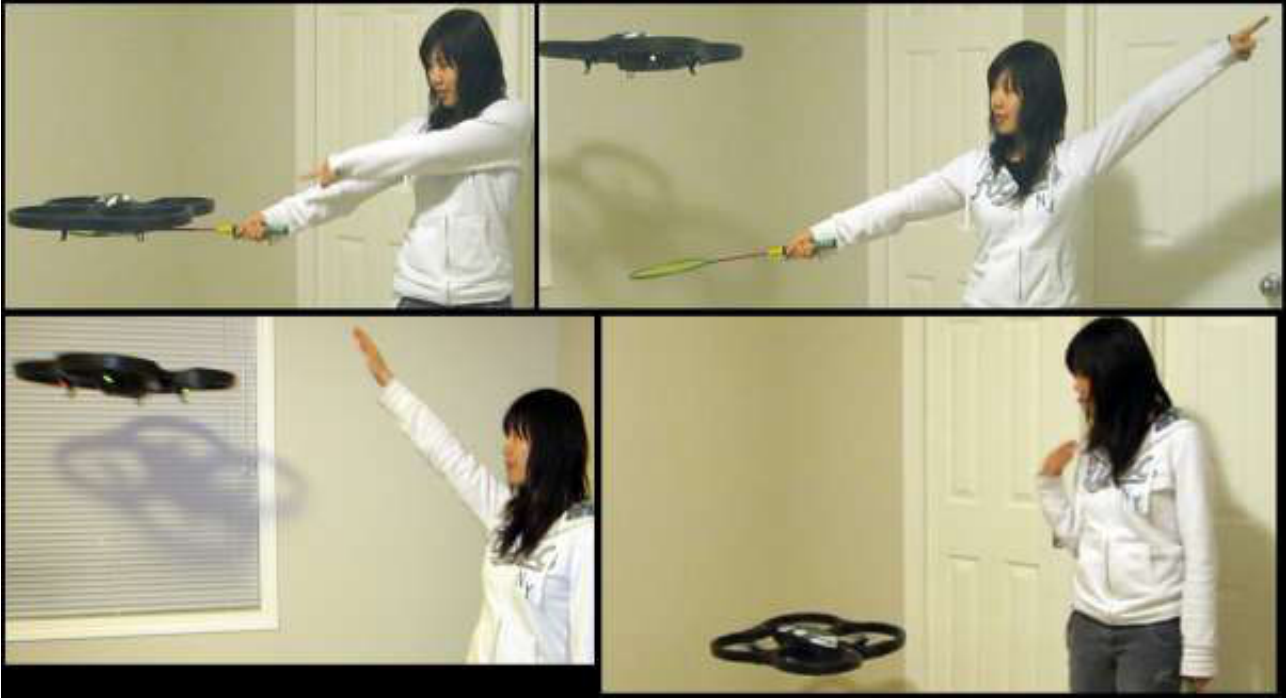
We introduce a socially motivated interaction technique with collocated flying robots (a quadrotor in our current prototype). Instead of the traditional remote interaction
controllers often used when interacting with flying robots and UAVs, we explore the collocated interaction space and suggest a direct interaction technique motivated by social
human-robot interaction themes. Our approach is inspired by the types of interaction humans have with birds, specifically falconeering, and is facilitated by gestures-based
interaction, while the user is within the field of view of the flying robot. The project also involved conducting a preliminary evaluation of our approach, performed through two
design critiques, studying our collocated interaction technique concept, and its potential, drawbacks and benefits for users.
Researchers: Florence Ng, Ehud Sharlin
- Publications:
- W.S. Ng, E. Sharlin, “Collocated Interaction with Flying Robots”, Proceedings of 20th IEEE International Symposium on Robot and Human Interactive Communication (Ro-Man 2011), August 2011, Atlanta, USA.
- W. Ng and E. Sharlin, “Collocated Interaction with Flying Robots” Departmental Technical Report 2011-998-10, March 21, 2011, Department of Computer Science, University of Calgary, AB, Canada, 2011.
Video:
![]()