Abstract:
In this paper, we present a view of robots as physical agents
submitting to a static infrastructure, allowing a
computerized static system to use the robot as a dynamic
puppet, which is a social agent that can communicate on
physical and social terms with its human users and visitors.
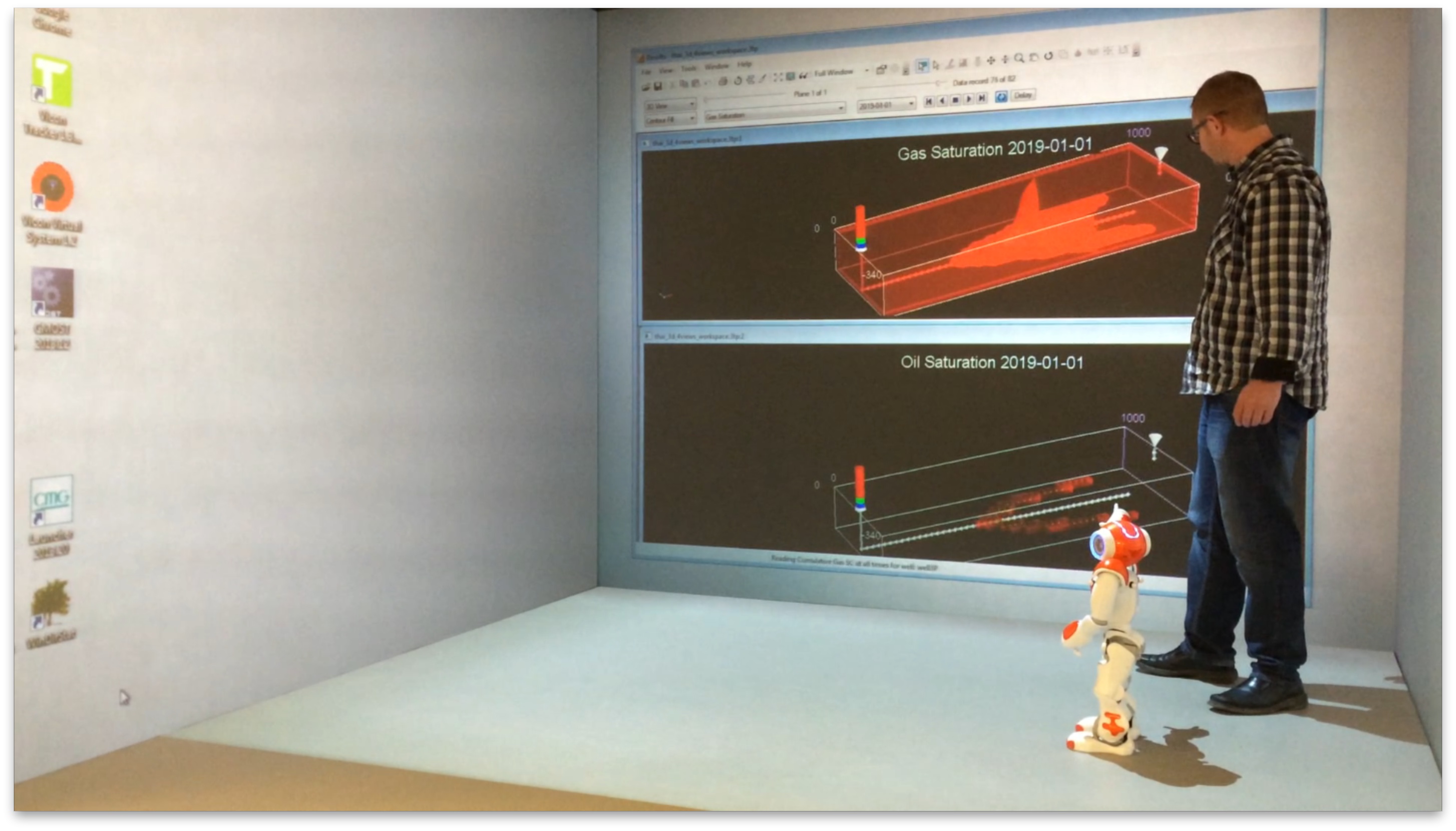
We demonstrate our approach with Ningyō of the CAVE, a
prototype designed to allow a virtual reality CAVE facility
to introduce its capabilities to human users and visitors.
Through the robot, the CAVE is able to highlight
capabilities and uses of the facility through performance,
showmanship and physical actions to create an engaging
interaction that conveys an overview of the facility and
demonstrates its key functionalities. We examine the
quality of the resulting engagement with preliminary
reflection by several human visitors to our CAVE system.
We believe that viewing robots as components of a greater
and more capable computerized ecosystem is a less
explored research path in social human-robot interaction,
and hope that our Ningyō of the CAVE prototype could set
the stage and inform some of the future research on this
topic.
Researchers: Nico Li, Stephen Cartwright, Ehud Sharlin, Mario Costa Sousa