Abstract:
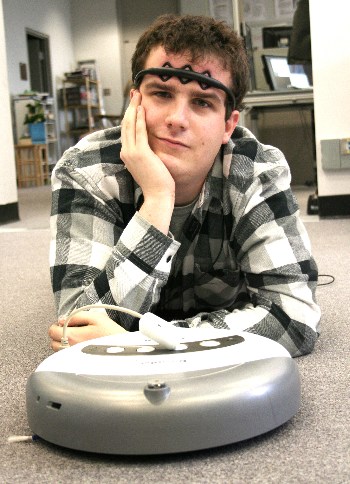
Several emerging computer devices read bio-electrical signals (e.g., electro-corticographic signals, skin biopotential or facial muscle tension) and
translate them into computer- understandable input. We investigated how one low-cost commercially-available device could be used to control a domestic
robot. First, we used the device to issue direct motion commands; while we could control the device somewhat, it proved difficult to do reliably. Second,
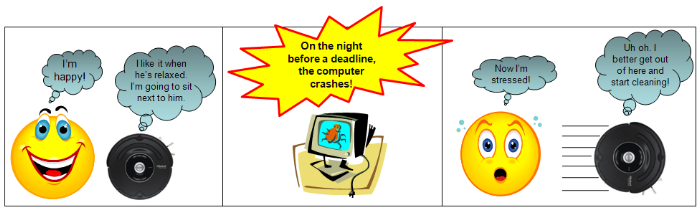
we interpreted one class of signals as suggestive of emotional stress, and used that as an emotional parameter to influence (but not directly control) robot
behaviour. In this case, the robot would react to human stress by staying out of the person’s way. Our work suggests that affecting behaviour may be a reasonable
way to leverage such devices.
Researchers: Paul Sauliner, Ehud Sharlin, Saul Greenberg
- Publications:
- P. Saulnier, E. Sharlin and S. Greenberg, “Using brain-robot interfaces for controlling implicit social patterns”, Workshop on Brain Machine Interfaces for Neuroprostheses and Robot Control, at ICRA 2009, the IEEE International Conference on Robotics and Automation, May 2009, Kobe, Japan, Extended abstract and poster.
- Saulnier, P., Sharlin, E. and Greenberg, S, “Using Bio-electrical Signals to Influence the Social Behaviours of Domesticated Robots”, Poster in Adjunct Proc. Human Robot Interaction (Late Breaking Abstracts) - HRI'09. (San Diego, California), Extended abstract, March 11-13.