Abstract:
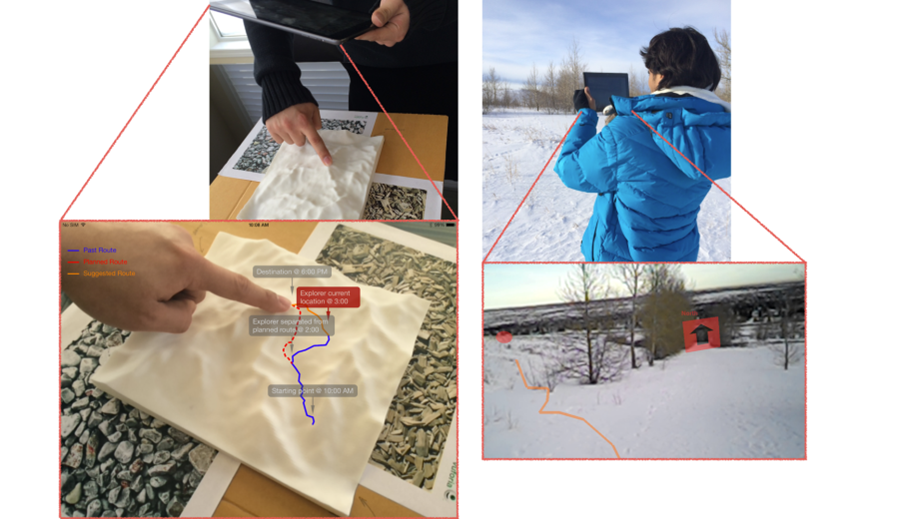
We present our prototype of Shvil, an Augmented
Reality (AR) system for collaborative land navigation.
Shvil facilitates path planning and execution by creating
a collaborative medium between an overseer (indoor
user) and an explorer (outdoor user) using AR and 3D
printing techniques. Shvil provides a remote overseer
with a physical representation of the topography of the
mission via a 3D printout of the terrain, and merges the
physical presence of the explorer and the actions of the
overseer via dynamic AR visualization. The system
supports collaboration by both overlaying visual
information related to the explorer on top of the
overseer’s scaled-down physical representation, and
overlaying visual information for the explorer in-situ as it
emerges from the overseer. We report our current
prototype effort and preliminary results, and our vision
for the future of Shvil
Researchers: Nico Li, Aditya Shekhar Nittala, Ehud Sharlin, Mario Costa Sousa