Abstract:
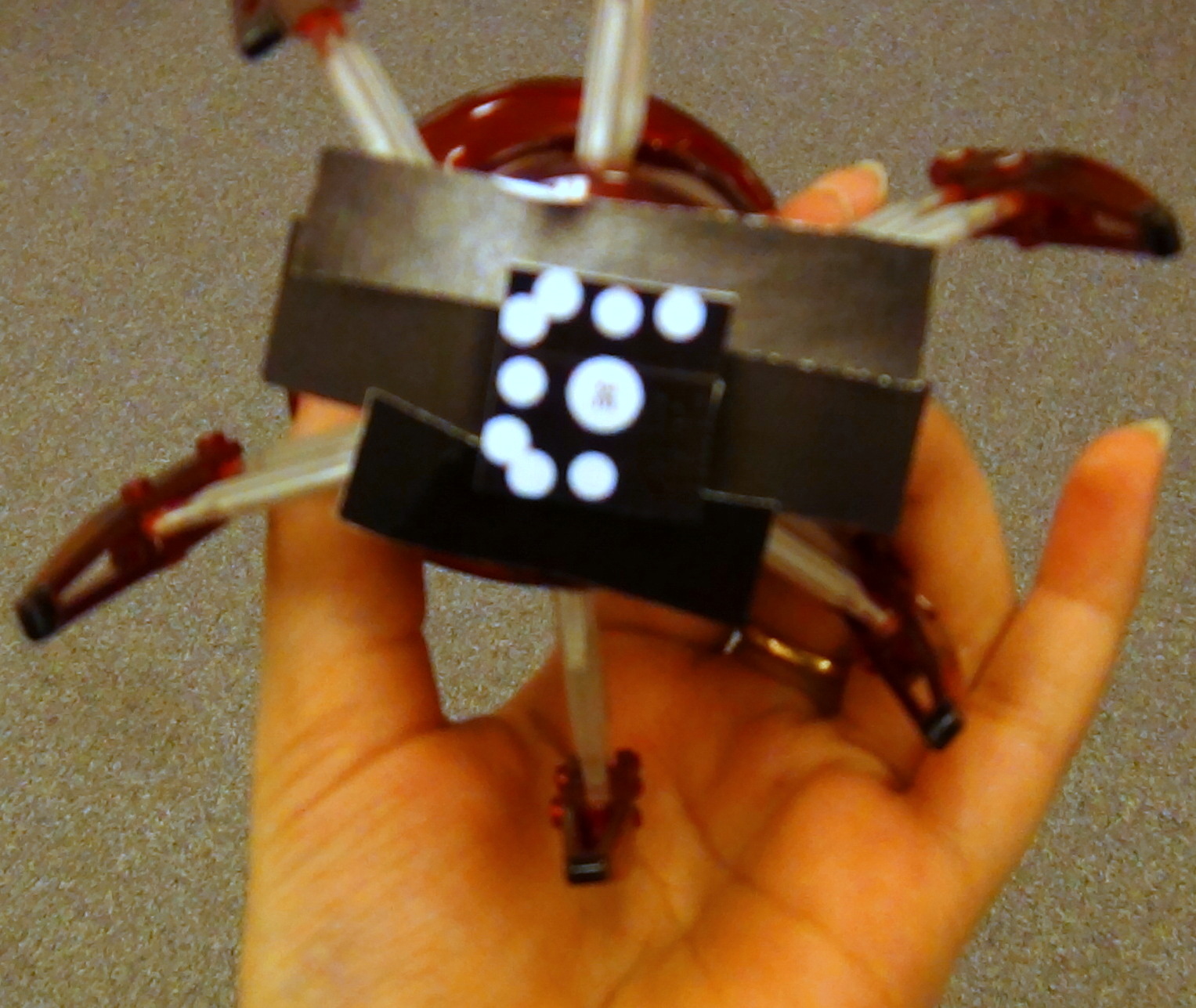
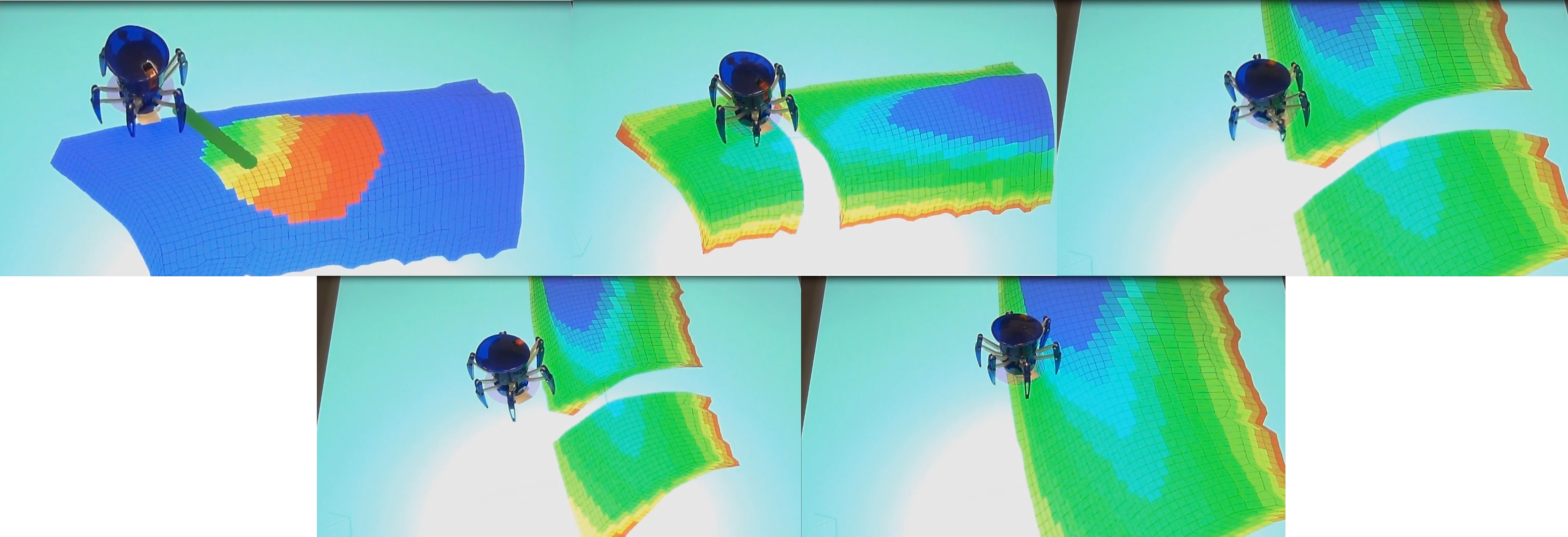
Spidey, is a tabletop robot protoype designed to collaborate with people and assist them in a tabletop scientific data exploration task, with the aim of
being task oriented, efficient as well as socially valid. Spidey is aware of both the person’s tabletop actions, as well as the task at hand, and can initiate
actions or react to the person’s actions according to need. With the Spidey testbed we explored the notion of proxemics between a person and a robotic tabletop
assistant and performed a study in which domain experts interacted with Spidey.
Researchers: Sowmya Somanath, Ehud Sharlin, Mario Costa Sousa
- Publications:
- S. Somanath, E. Sharlin and M.C. Sousa, “Beyond Actuated Tangibles: Introducing Robots to Interactive Tabletops”, Work In Progress (WIP), Seventh International Conference on Tangible, Embedded and Embodied Interaction (TEI’13), 2013. Barcelona, Spain.
- S. Somanath, E. Sharlin and M.C. Sousa, “Integrating a Robot ina Tabletop Reservoir Engineering Application”, Late-Breaking Report, Human-Robot Interaction (HRI’13), 2013. Tokyo, Japan.
- S. Somanath, E. Sharlin, M. Costa Sousa, “Spidey: a Robotic Tabletop Assistant”, Technical Report 2012-1022-05, February 2012 , University of Calgary, AB, Canada.
Video:
![]()